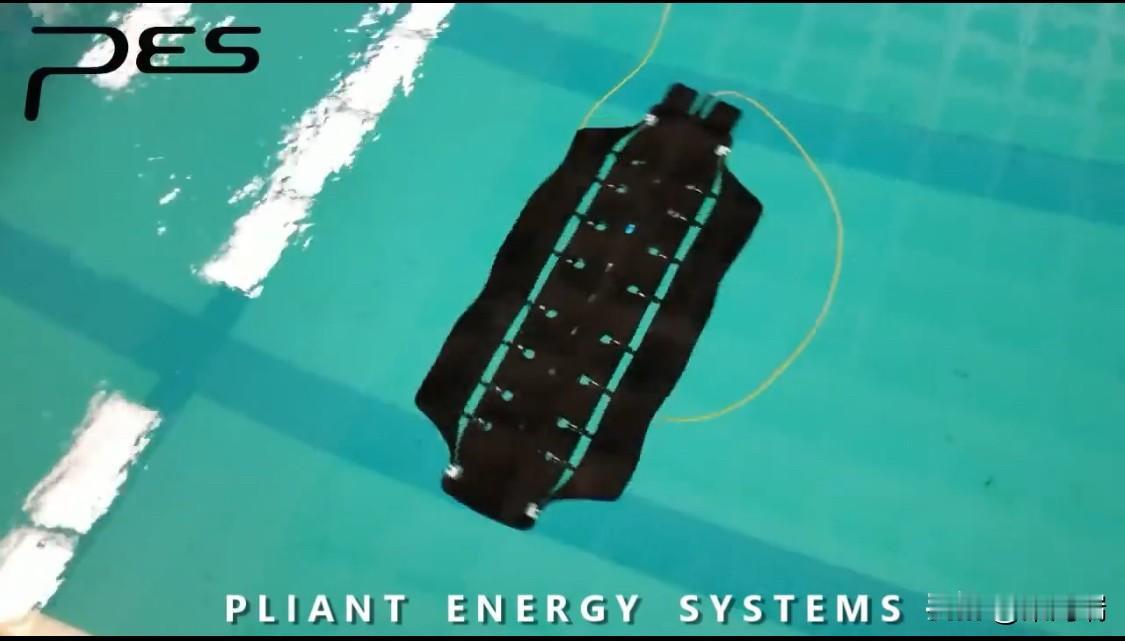
由Pliant Energy Systems公司开发的仿生两栖机器人,采用柔性波浪形鳍片实现安静高效的推进。该机器人可在水面、陆地、冰面和松软地形上无缝移动,支持勘探、检查、研究和环境监测任务。 这款由 纽约柔性能源系统公司(Pliant Energy Systems )开发的仿生机器人名为 Velox,或被称作“敏捷两栖游泳者”(Agile Amphibious Swimmer, AAS-1),它采用柔性波浪形鳍片实现推进。 主要特点与应用 推进原理: 该机器人两侧装备有波浪形的柔性鳍片,模仿鳐鱼或鱿鱼的运动方式,通过改变波形参数提供前进和转向动力。这种推进系统高效、静音,对环境扰动极小。 多地形移动: Velox 不仅能在水中自由游动,还可以在陆地、冰面和松软地形上滑行或爬行。 任务多样性: 其多功能性使其适用于多种任务,包括军事、海洋生态监测、珊瑚礁检查、水下排雷和搜救行动等。 其他型号: Pliant Energy Systems 还开发了名为 C-Ray 的新型号,正在实现完全自主化,并探索利用微塑料垃圾作为能量来源的可能性。