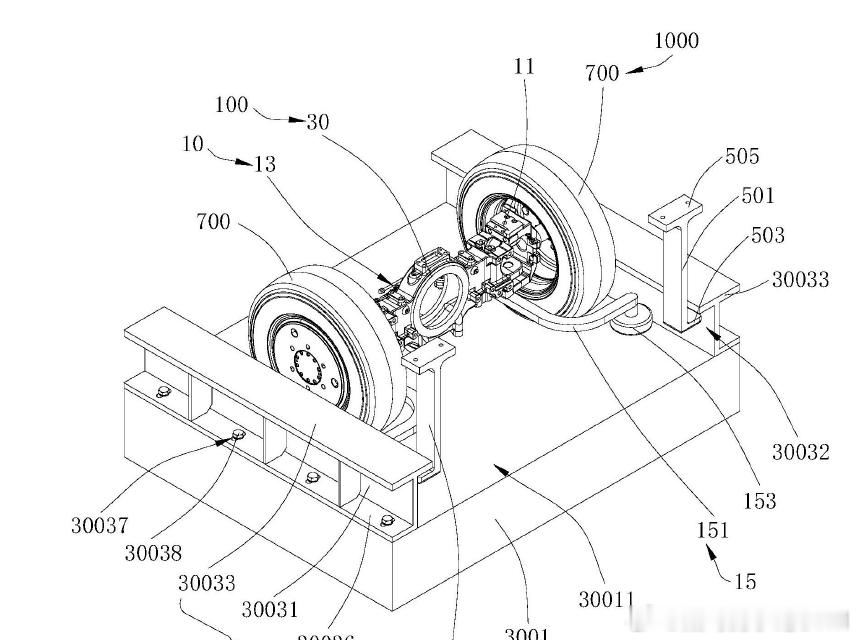
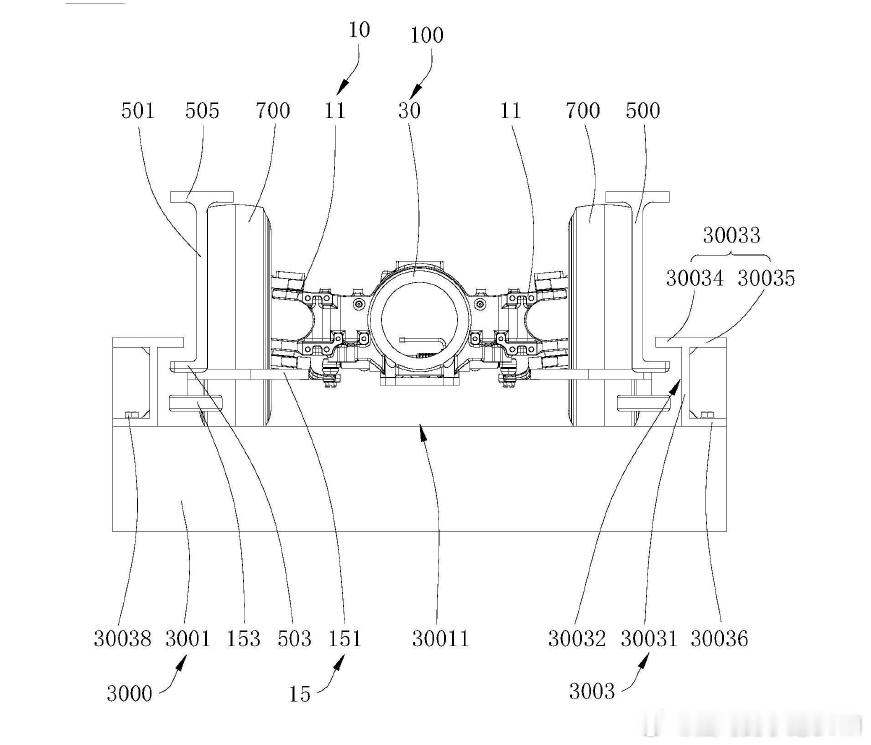
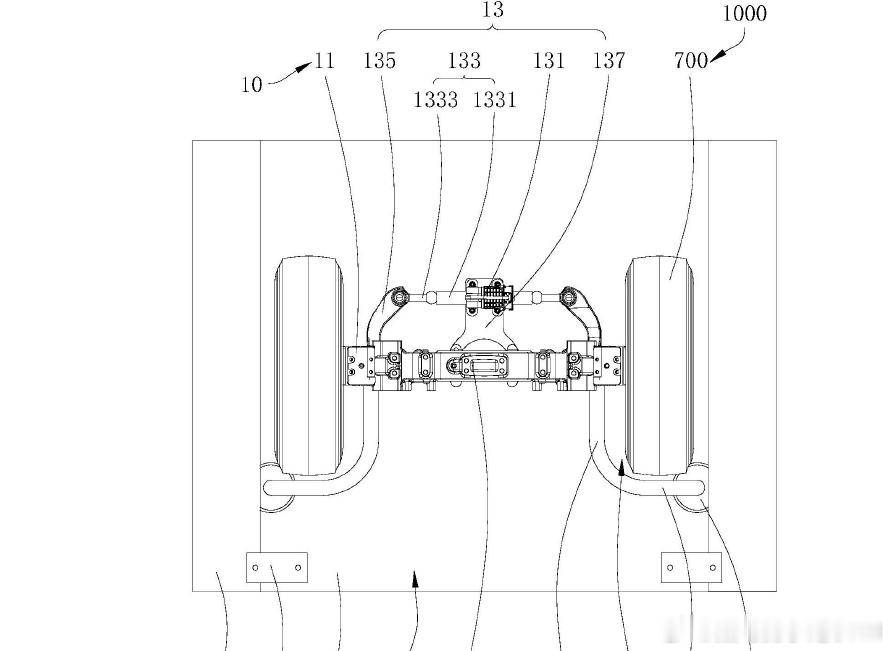
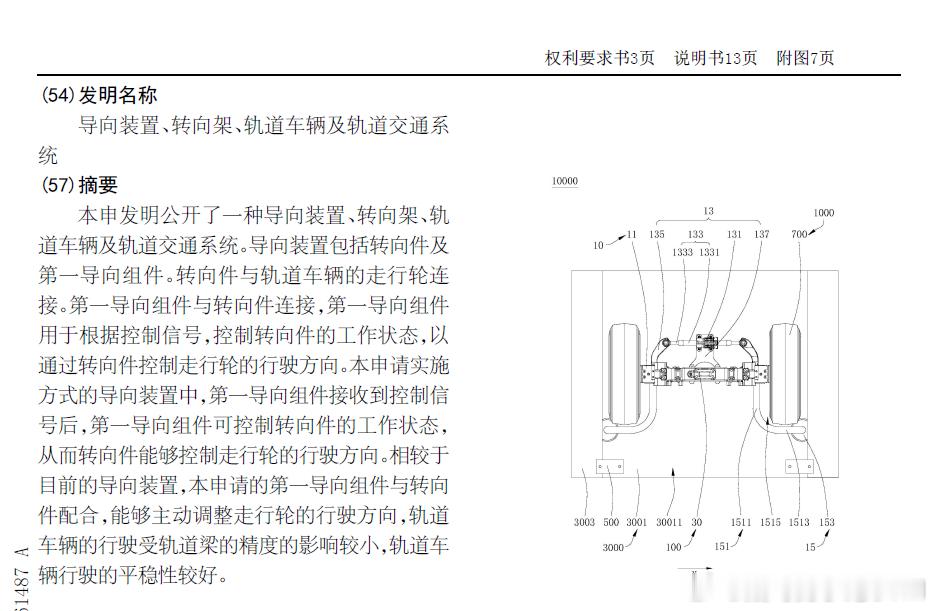
技术巡猎 比亚迪 “导向装置、转向架、轨道车辆及轨道交通系统“---很明显了,又是一个云轨专利,不过这次面向的是舒适性。传统导向式轨交(尤其是跨座式单轨那类)的逻辑,走行轮在梁的顶端滚动,导向轮则贴着梁两侧的导向面运行。列车转弯的时候,并不是说它和汽车一样,前轮会跟着方向盘转,而是和小时候我们玩的那种四驱车差不多,滑轮和跑道的力之间的作用,让车“实现转向”。问题也就出在这儿,导向梁的两侧,导向面的间距、平面度、施工误差一旦不够丝滑,导向轮就会被迫吃到横向激励,你可以这么理解,车轮一直在蹭路牙子。车是能走的,但它一直抖,乘客的感受好得了嘛?这是比亚迪这份专利的核心,导向装置里塞了一个“第一导向组件”,它不是单纯一个轮子,而是作动器+拉杆+联动件的机械链路,直接可以改变转向件的角度,让走行轮的方向变成可控---你把它想成汽车的转向机构就行:电机推拉拉杆---带动联动件---把轮子摆到你希望的角度。方向主导权从“轨道几何”挪了一部分到了“车端执行器”。直线路段的时候,作动器不驱动,拉杆相对轨道梁保持不动,转向件不转动,车就老老实实直着走。弯道/道岔这些需要转向的段落,控制信号让作动器工作,拉杆运动带着联动件转,转向件开始跟着摆动,走行轮就开始主动转向。这里面其实没急着讲什么高深的算法,就是把“需要一个平滑的控制信号,否则转向不太柔和”这种工程前提写出来而已,但这其实也是后续系统落地的难点:控制策略、执行器响应、机构间隙与回差,这些都要一并考虑。“被动导向“结构依然是在的,作为保留,它成为了第二导向组件。但它主要是在关键工况下参与导向,专利里写了一个失效逻辑:第一导向组件如果有控制偏差或失效,第二导向组件依然能通过与轨道梁配合,实现车的导向。第二导向组件的连接件,做成了类似“L”形的两段,中间留了一个避让空间可以让走行轮包进去,相当于是在很小的空间里,把“导向轮要靠外侧工作”和“走行轮要自由滚动”这对矛盾给摁住了,是有点巧妙的。还有一个几何关系是,导向轮轮距大于走行轮轮距。过弯时,车辆会有横向偏移趋势,外侧导向轮更容易先贴上外侧导向梁,尽早建立稳定的导向接触,同时走行轮侧面还能留出间隙,减少无谓摩擦和磨耗。这种设计属于“把接触变成你想要的接触”,不至于让磨耗变成随机事件。轨道梁侧也有一些工程化改造:走行梁在中间,两侧导向梁提供竖向导向面;导向梁的连接部还做了腰形孔,允许装配时调节两侧导向梁间距。另外还提了防侧翻件与导向梁止挡部的配合,等等等,这些机械细节,咱就不多叙述了。只从用户侧俩看,收益其实是很直观的,乘坐的体验更稳当、噪声更小。运营方实际上也有利益点:由于对导向梁几何精度的依赖降低了,装配调节空间更大,维护策略也有很大的优化空间。谁说迪子只能造汽车了?