技术巡猎 比亚迪 车辆爆胎的控制方法、控制器、车辆,介质和程序产品---爆胎这事,其实说过很多次了,平时没人喜欢讲,但它一旦发生,往往就是“来不及讲道理”了。对爆胎的直觉许多人还停留在“方向盘握紧、别踩刹车、慢慢靠边”的处理方式里,但对一台现代电车/混动来说,车其实还有很多“手段”可以帮你解决姿态的问题。
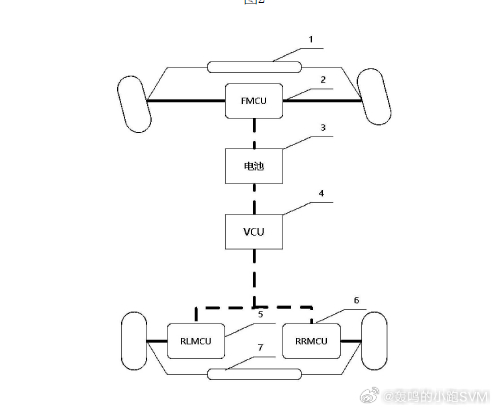
这份专利的思路是,爆胎发生后只靠ESC点刹去“硬造横摆力矩”是不够的,也可以把后轴当成一个可以主动干预的执行器---后轮能独立转向的话,后轮左右还能独立给扭矩,或者这么说,以前更多靠刹车去拉车身,就和拽手刹差不多;现在多了“船尾舵+左右桨”的方法,可以用更细腻的方式对齐车的头和尾了。
举个例子,这么个场景,高速上右后胎突然泄气,车尾会往右沉一下,紧接着车身产生了一个你不想要的偏航,驾驶员下意识可能会反打方向、松油门甚至踩刹车。问题是爆胎带来的不对称力非常快,快到你还没来得及做“正确动作”,车已经开始偏了。传统ESC能做的,是通过某个车轮的制动把车拽回去,但制动的副作用也明显:速度掉得飞快,姿态变化有点生硬,驾驶员的感受就是“车突然被按住了”,就很容易会被吓一跳。
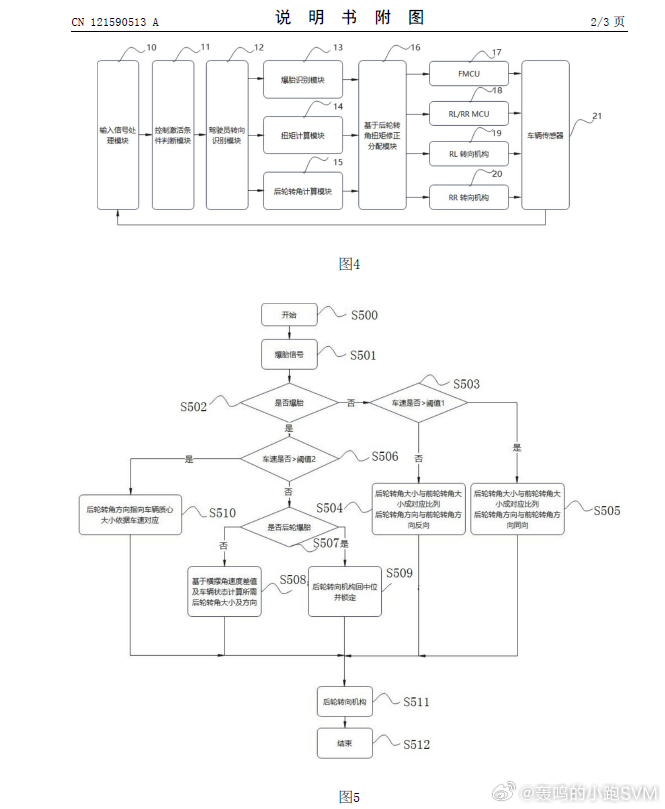
这份专利把策略分成了两个速度世界。车速大于第一阈值(专利举例可以取40km/h)时,它的动作有点“反直觉”:它不太纠结爆的是哪条胎,而是直接让后轮的转角方向指向车辆质心,也就是说,期望车尾不要乱摆,先把“尾巴”收回来,后轴的侧向力先把车往中间拉。后轮转多少角通过车速去查一张“车速-转角映射”;扭矩怎么给,则盯着横摆角速度来确定。高速工况里它追求的是快速抑制偏航趋势,不要让车继续被甩出去。
车速小于等于第一阈值时,逻辑就开始精细了,因为低速的时候,你往往是在城市里并线、掉头、绕障,车的“可控性”比“硬稳住”更重要。这里它会用爆胎位置来分支。
如果判断是后轮爆胎,它要求后轮转向机构回到中立并锁定:后胎都已经失去正常侧向能力了,你还让它转向去“要侧向力”,很可能是添乱,所以把后轮转向这条通道关掉,剩下的交给扭矩来做弥补就可以了。如果判断是前轮爆胎,它会做一件底盘控制里很经典的事情:算“目标横摆角速度”。
它用的是类似线性单轨模型的形式,前后轮转角、车速、轴距、质心到前后轴的距离、前后轮侧偏刚度这些参数都放进去做计算了,得到了一个车在当前转向输入下“应该有的”横摆响应。然后拿目标值和实际横摆角速度做差,差值决定后轮转角方向---差得多就往一个方向修,差得少就轻一点。
扭矩这条线也不错,它会根据车速和驾驶员需求算一个“需求扭矩”,再算目标横摆角速度,再算“目标修正扭矩”。修正扭矩不单靠PID闭环,拆成了前馈+反馈两部分:车速在一张“基础修正扭矩表”里先查个底子,再把横摆误差喂给PID算反馈修正,最后把两者合在一起。然后还会考虑后轮转角,把车端修正扭矩通过cos(后轮转角)换算到轮端,避免角度带来的投影误差。
最后的关键是怎么把这股“修正力”分到各个电机上。专利里的分配原则把min[0,需求扭矩]这种“切断”逻辑都摆出来了:哪个轮爆胎,哪个轮的需求扭矩就尽量切掉(至少不再驱动它),然后把修正扭矩的一半从前轴扣掉,另一半加到健康的后轮上;前轮爆胎时则切前轴,把左右后轮做“一减一加”的差动。最后还强调扭矩转移要做步长平滑和上下限限制。
说到这,其实之前针对爆胎到底危险不危险,最大的争议已经有答案了。它想解决的,并不仅仅是“能不能救回来”而已,它想要做的是“把爆胎救回来的过程,你在体感上它和正常的车差不多,没有任何的惊吓感”。
爆胎控制最怕两个问题,一个是反应慢,一个是反应太猛吓到驾驶员,导致他做出更糟的动作。而后轮独立转向+后轴独立扭矩,确实给了底盘更多柔性的自由度:同样是抑制偏航,你可以用更小的制动力、更连续的力矩变化、更符合直觉的车尾姿态去完成。
电控解决了第一个问题,而体感上的课题如果也解决了,对“爆胎后处理”的安全性提升不只是一点点而已---很多人说“爆胎增稳技术”无用,实际上就是忽略了第二个问题