蔚来的NWM2.0量产有回退吗?
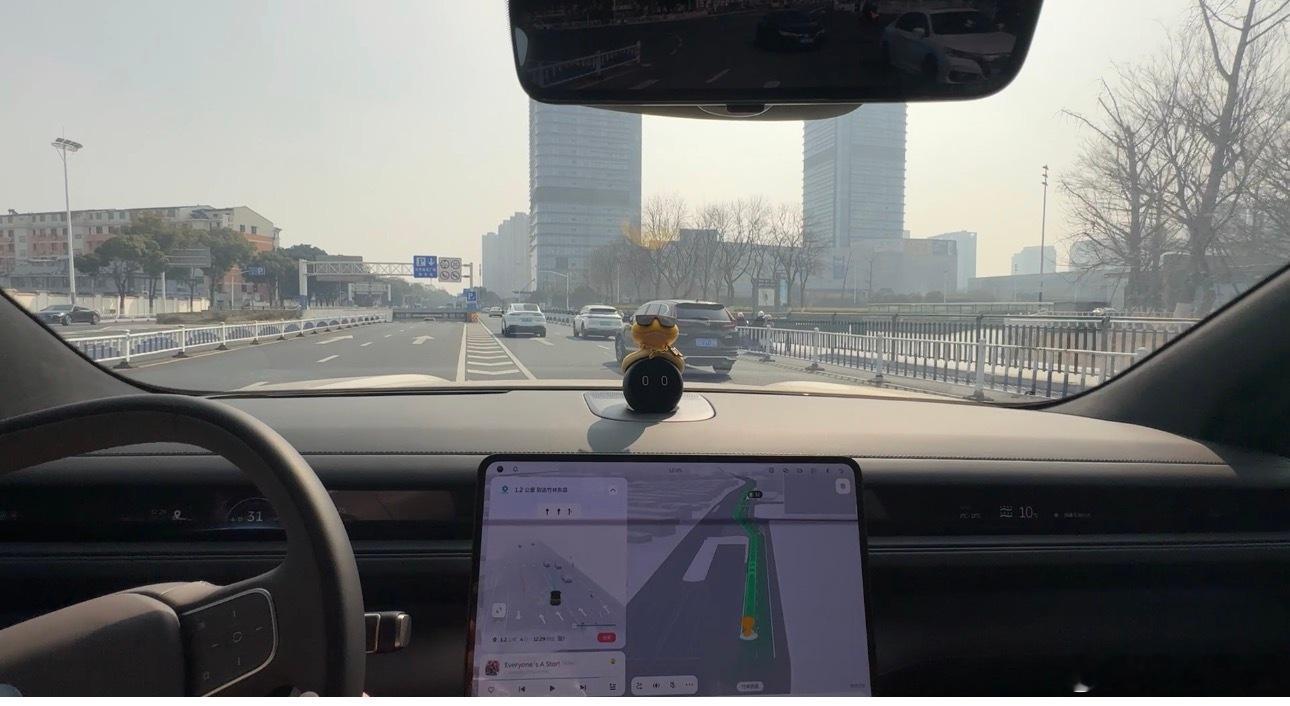
在飞机上正好没事,先来写一点这几天开新ES8的NWM2.0的体验,整体应该是进入了可用和还用之间,有非常惊艳的地方,也有基础能力不稳的地方,这两种都是有但不多。和距离之前体验的工程版来说应该是回退非常少的,可能这种也可以叫做真诚!
先说说不行的地方吧,路口压实线的情况还是会偶发,多数情况都是因为道路结构理解不足,导致虚线位置未能及时进入目标车道,比如左转弯后立即要进入最右边的第三车道,自车往往都是进入第一车道后再发起向右变道,如果右边有车就会丧失虚线变道可能。
面对慢速倒车的情况感知有高发漏检可能,在路面上出现的从非机动车道上倒车进入机动车道的情况,有较高的概率无法识别正在倒车的车辆,可能毕竟碰撞时刻会触发AEB,但这个导致用户心里压力过大。
还有就是限速不达,主要是在封闭路段或者有的空旷路段会开不足限速,这个场景和上个版本的NGP有点类似,导致效率有所下降。不过最近蔚来已经紧急推送了一个新的版本,应该对这个情况做了修正。
最后就是防御性驾驶还有提升空间,面对突然从人行道和非机动车道进入机动车道的外卖车辆,虽然轨迹上和自车未必重叠,但不降速的体感,造成了一定的紧张感,如果能做适度的减速,会在体感上提升很多。
毫无疑问,NWM2.0最巨大的提升就是蔚来的辅助驾驶至少已经不再是蔚来卖车的阻碍,消费者不会因为辅助驾驶不足而抗拒选择蔚来,把短板补上对于蔚来来说是非常重要的。
在新版本上,尤其是神玑芯片加持的白杨版本,对车辆纵向速度的控制非常精确,可以做到类似“微操”的体验,简单聊几个场景:
1.复杂小路上的S型跨实线绕行,这个场景最大的挑战就是跨实线超车以后要在对向车辆逼近以前返回自车车道但不能过于急迫造成车身晃动。在我多次的体验里,这个场景新8处理的很好,无论是SR上的轨迹和绕行时候方向盘的动作都给出的非常稳定,没有抖动或者锯齿感。这样带来的体验优势就是感觉非常顺滑,稳定和安心。
2.路口右转有行人过马路让行场景,这个场景挑战在于要很好预测行人通过的速度,控制车辆缓行正好在行人通过后通过路口。这个体验蔚来做的是非常好的,而且这个控速感来的比较早,在贴近人行道之后还会蠕行保持车辆在一个动态的情况,避免停车,这里很有点HSD的那种蠕行的感觉,挺不错的。
3.变道逻辑很灵活,现在很多辅助驾驶的变道逻辑都是加速变道,想要通过加速拉开距离实现变道。但现实中由于限速的存在,或者前面或者侧面车的随行,导致无法实现目的。新8这次变道进化最好的在于会很好的去推理目标车道的空间可能性,也就是说如果前方明显车流拥堵,就不会发起加速,因为加速意味着离实线距离越来越近,风险快速攀升。这种情况下,自车会更多的去降速就等待后方时机然后切入,带来更多的安全感很稳定感。这里如果能像ADS4.1那样学会去压线争取空间那效率还能更高一些。
4.大路上的选道逻辑进步不少,原来上一个版本在大路上开错路的情况得到了很大的抑制,而且在路口也学会进入排队少的高效车道了,而且进入的非常顺滑。
5.安心感很好的盲区影像,蔚来除了正常的盲区影像设计外,还能把A柱的盲区也显示出来,在大屏上用两块屏幕显示出来。一开始看会有点不习惯,但大概用了一周的时间感觉还挺不错的。而且辅助驾驶阶段也正常显示体验挺好。
6.原地启动能力好评,现在在路边或者学习过的车位,自车已经可以原地直接进入辅助驾驶状态了,非常好评。
整体来说,我觉得神玑上这套系统有很多细节上的体验优势,大家用车的时候可以好好的体验一下,从这些细节上可以看出这套系统的上限可能性应该有很大的空间,但到底能榨出多少来,就看蔚来小伙伴的努力吧!
最后,有个意见,SR画面和地图比例可以更灵活一点,比如SR更大,地图更少这样,毕竟还是有一些诸如我这样特别关注辅助驾驶体验的用户会喜欢这样呀!蔚来汽车新能源汽车蔚来全新es8