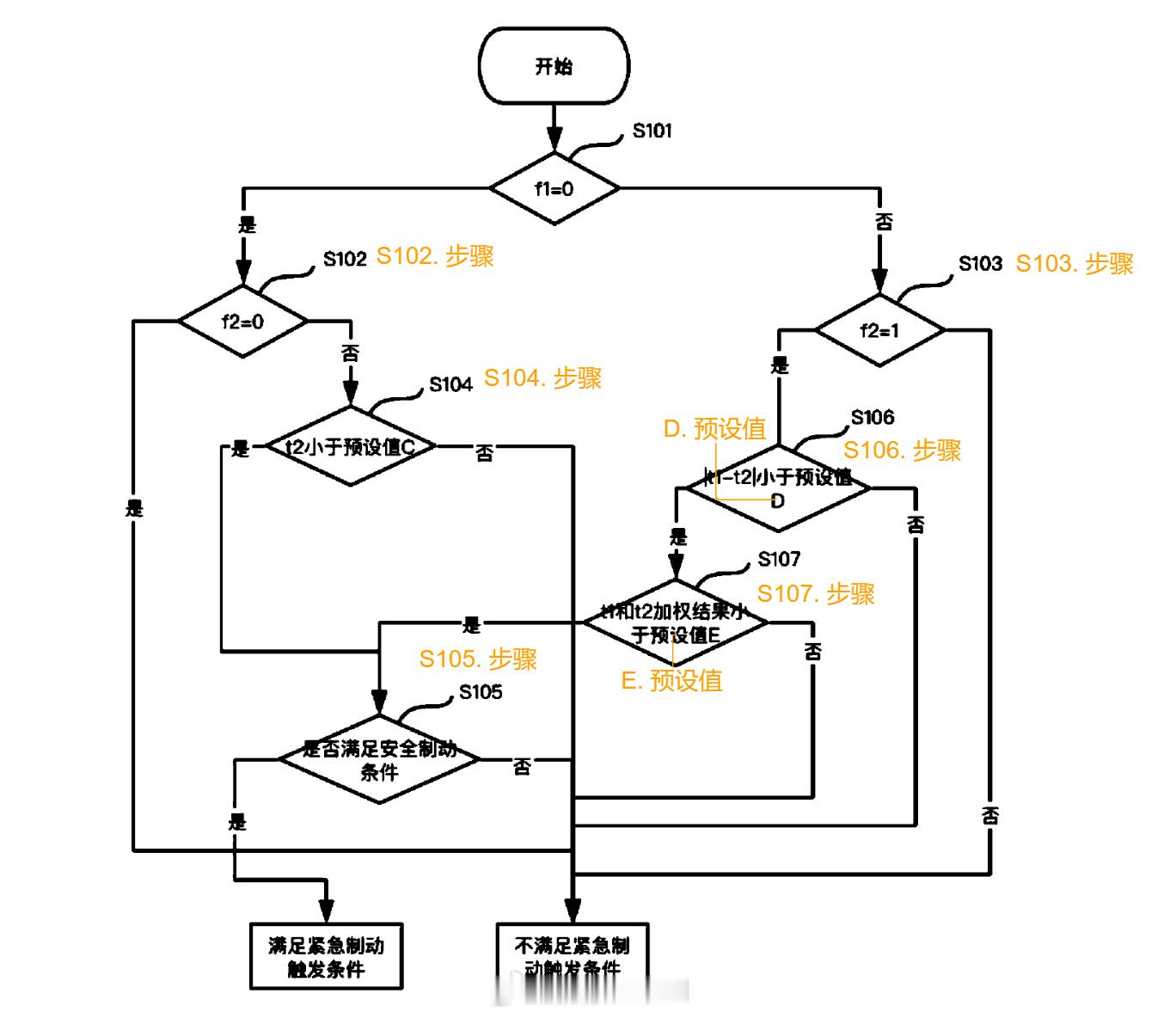
今天聊聊AEB这个功能。有些人认为AEB就是遥控器,按下汽车就能立刻停止。这个逻辑是错误的,AEB的全程是自动紧急制动系统,本质上,它是在紧急情况下帮助人踩刹车。既然说踩刹车,AEB的灵敏度就很重要了。这就体现在几个维度:1、踩下刹车的“意愿”:如果前面看到任何疑似障碍物都要踩刹车,那肯定会很恼火;展开说就是:灵敏度过高可能导致误刹车,过低则可能无法及时避免碰撞。影响这个“意愿”的信息有很多,尤其是汽车到底能不能看的“清”。所以我们才会去区分,哪些车的AEB是摄像头的,哪些车是多种传感器联动的,最好还能有激光雷达的。再来一点,数据处理算法也很关键。 算法需要快速、准确地识别并跟踪前方车辆、行人、自行车等潜在障碍物。基于障碍物的速度、距离、相对运动轨迹等信息,评估碰撞风险。下图1-4就是一个很典型的工作流程。它的逻辑是:获取第一特定信息和第二特定信息;根据所述第一特定信息和已知的整车数据得到第一预计碰撞时间t1和第一碰撞危险标志位f1,并根据第二特定信息和已知的整车数据得到第二预计碰撞时间t2和第二碰撞危险标志位f2;根据t1、t2、f1、f2判断是否满足紧急制动触发条件,当满足条件时进行紧急制动,当不满足条件时不进行紧急制动。2、踩下刹车的力度:AEB的刹车力度需要分级处理。展开说就是:根据碰撞风险等级,决定是否采取预警、部分制动或全力制动。需要补充一点, 制动系统的响应速度和制动力直接影响AEB的效果。所以即便是同一台车,在不同的路况下,刹停能力也会有所不同。再来一点,由于AEB这种“犹豫机制”,它的实时调整就很重要了。但当车辆进行制动时,车辆发生纵摇运动,车辆的前面部向地面倾斜,从而前方传感器的方向也向地面方向倾斜。若前方雷达因这种倾斜而错过危险车辆,则AEB系统可能会判断为前方的碰撞危险状况已结束而结束自动制动,导致与前方车辆的碰撞。所以能否解决这个问题就是各家的技术分水岭了。水平高的车企,如果车辆的制动中发生车辆的纵摇运动,是可以通过调整传感器模块的信号发射方向,进而提高对前方车辆的感知性能。3、踩下刹车的时机:高速行驶能否触发AEB一直是争议的话题。过去AEB的触发上限被定在70km/h左右,但现在甚至出现了120km/h就可以触发的AEB。展开说就是:由于车速越高,相同的距离对应的制动时间越短,对AEB的响应速度要求越高。要解决这个问题,一方面我们需要感知系统更强大,能越早看见危险越好。但同时,车子本身的刹停能力考验也会更大。解决思路最常见的是,通过在AEB系统中调整控制器的参数,根据车辆实时速度和目标减速度调整比例-积分控制器的系数,结合前馈控制,解决常规AEB系统在不同车速下响应时间和减速超调量差异的问题。但不管怎么说,大家要注意了,AEB是被定义在L2级别的辅助驾驶功能,从L2的定义看,它还是需要人作为主导的,所以这个配置并不是让你完全撒手不管。