近日,西安交通大学陈雪峰教授团队通过模拟人类皮肤中触觉小体的感知特性,提出了一种名为TAP(扭矩-角度-压力)的触觉传感器。该研究成果以《扭矩感知赋予机器人类人级别的灵巧性》(Touching with torque enables human - level robotic dexterity )为题在线发表于国际学术期刊《科学进展》(Science Advances)。 机器人很难感知类人手的交互感
人的指尖藏着惊人的秘密:当我们拿起东西时,皮肤不仅能感知压力和滑动,还能通过细微的“扭着捏着”的感觉(也就是扭矩),判断物体和手之间到底发生了什么——是快滑掉了?还是放稳了? 指面扭矩感知不仅提供力的大小和方向,同时给出了施力点与环境的交互关系(如碰撞、平衡和阻力等),这正是人类使用工具、精细操作、做各种巧活的关键。 然而,在机器人领域,类人手的力、位置、环境的交互感知仍然是一个巨大的挑战。机器人虽然力大无穷,但指尖却是“麻木”的。它们很难感知到物体在手中的微妙变化。 TAP传感器在精细操作领域潜力巨大
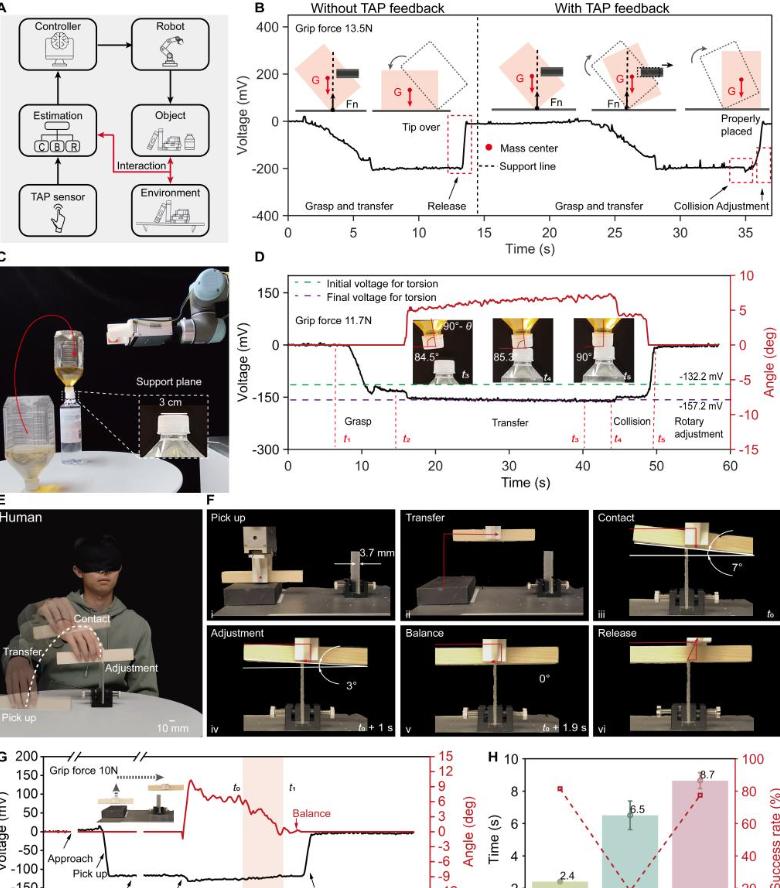
为实现如人类的精细化操作,研究团队提出了一种名为TAP(扭矩-角度-压力)的触觉传感器,这个TAP传感器就像是给机器人的指尖披上了一层高灵敏度的电子皮肤。它的一大绝活是:只用一条通路,就能同时感知“压得多重”和“扭得多厉害”。 TAP传感器通过单个读出通道即可在宽范围(±241.6 牛顿·毫米)内实现双向、高灵敏度(角度分辨率0.1°,扭矩分辨率0.4 牛顿·毫米)和高线性度(R²=0.99)的扭矩感知。 实验表明,TAP传感器能够同时感知压力和扭转信息,响应时间约为20毫秒。将这一传感器集成到机器人控制系统中,机器人能够在无视觉条件下完成多项精细操作任务:
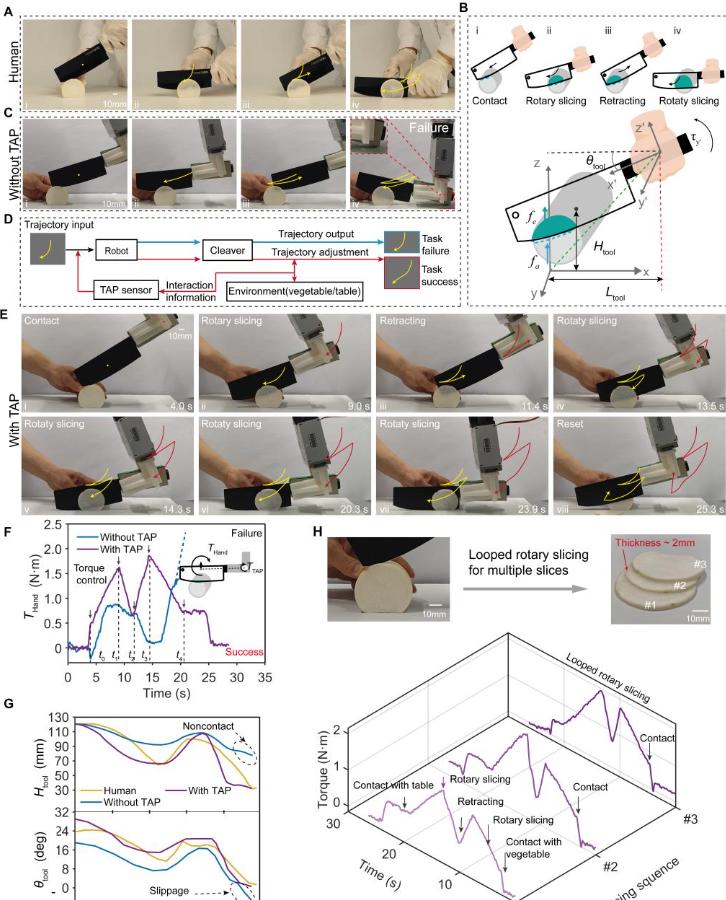
将一个倾斜46°的牛奶盒平稳放置、在2.4秒内完成平衡木堆叠挑战(成功率81.5%),以及通过实时调整切割路径完成白萝卜切片。 这一具有类人触觉感知能力的TAP传感器展示了其在精细操作领域的巨大潜力。由于其能够实时感知物体与环境交互状态的变化,TAP传感器在精密装配、医疗手术辅助、服务机器人等场景中拥有独特的优势。