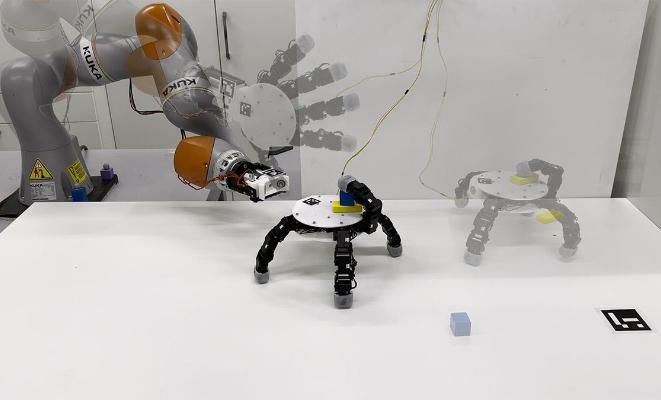
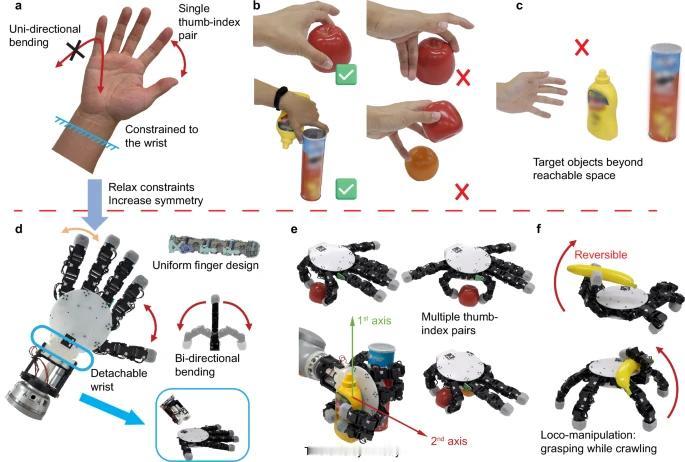
在我们仍对机器人精准叠衣、弹琴的技艺惊叹不已时,一款来自瑞士洛桑联邦理工学院的“巧手机器人”,已悄然改写着人们对机械肢体的认知。当地时间1月20日,这项研究刊载于《自然·通讯》,它不仅是一次技术突破,更让我看见人机协同的温柔可能,而中国研究员Xiao Gao的参与身影,更为这份跨界创新添注了别样暖意。 长久以来,机械手都在模仿人类手部的非对称结构,却也困于这份“模仿”——单面抓握、无法脱离基座,在狭窄空间或多任务场景中屡屡受限。而这款手掌直径仅16厘米的机械手,用对称设计撕开了突破口,五指与六指两款版本,能实现正反双面抓握,比人类手掌多了一份“无死角”的灵活。 其最惊艳之处在于可脱离基座自主爬行,靠内置驱动连续抓取3个物体后,仍能稳定对接机械臂。实验中,它既能抓起直径不足5厘米的卷筒芯,也能承载2公斤罐头,复现33种人类抓握姿态,精准度堪比人手。 这份灵巧绝非炫技:地震废墟中可穿缝抓取救援物资,仓储车间能高效分拣异形包裹,模块化设计比传统工业机器人更易落地,为柔性制造与应急救援开辟新路径。 这只小手打破了技术局限与刻板印象,从冰冷器械变为人类延伸的“伙伴”。技术主动适配人类需求,这样的创新才真正拥有打动人心的力量。