《The Reality Gap in Robotics: Challenges, Solutions, and Best Practices》
机器人领域的现实差距:挑战、解决方案与最佳实践
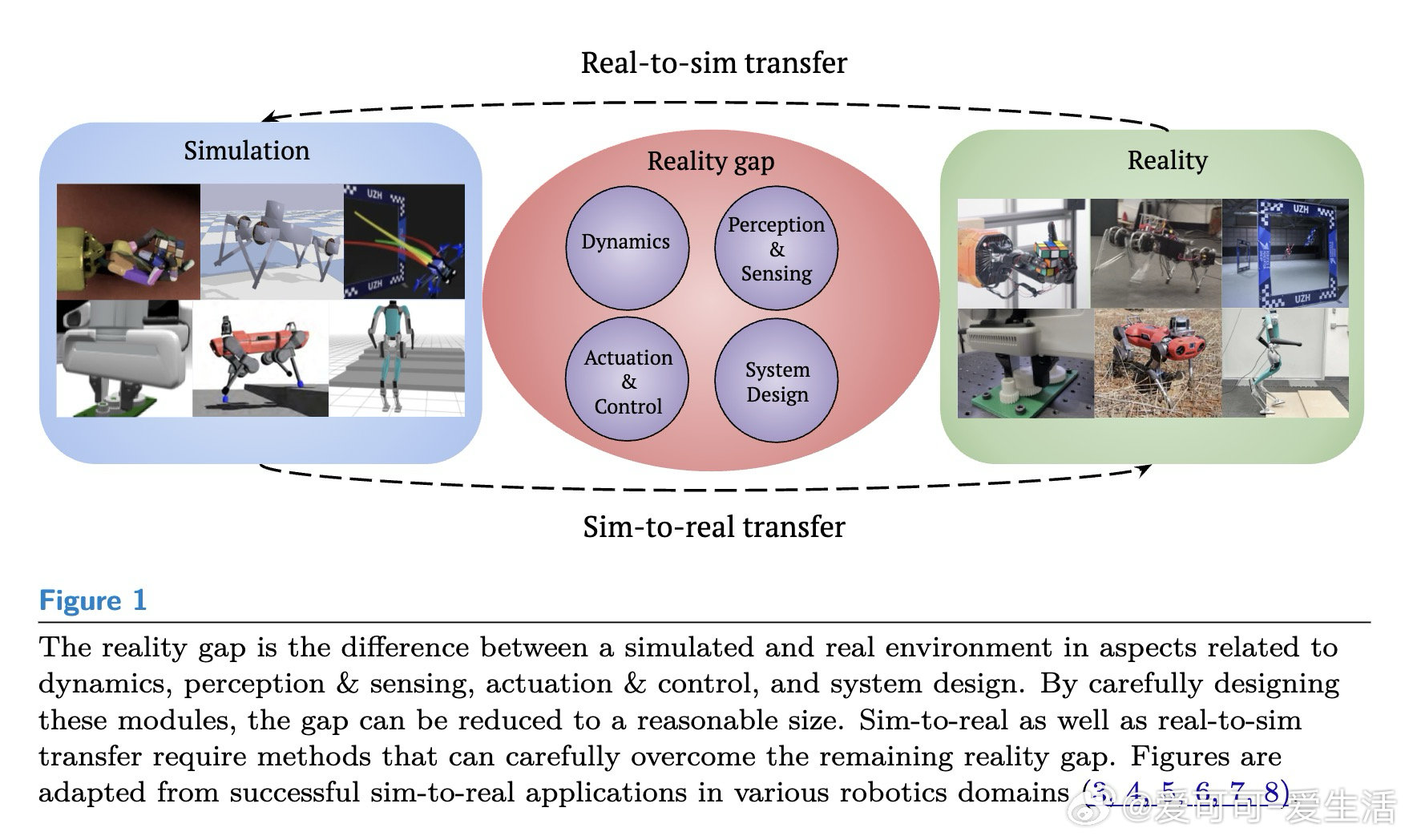
模拟技术在机器人学习中扮演关键角色,它提供可扩展、安全且高效的环境,用于训练导航、步态和操作等任务。然而,模拟总是基于抽象和近似,无法完美复制真实世界,这导致了“现实差距”(Reality Gap)——模拟与现实环境间的差异。这种差距阻碍了从模拟到真实的系统转移(Sim-to-Real Transfer),但也是机器人领域亟待解决的核心挑战。本文基于最新综述,系统剖析现实差距的根源、现有解决方案及评估指标,并探讨未来方向,帮助研究者和从业者更好地桥接模拟与现实。
>1. 现实差距的本质与重要性
模拟的优势显而易见:它允许并行训练数千个机器人实例,成本远低于真实数据采集,且实验高度可重复。例如,在自然语言处理和计算机视觉中,大规模数据集推动了突破性进展;机器人却因交互环境的复杂性而滞后。真实训练虽真实,但受硬件成本、人力依赖和可重复性限制。模拟可解决这些痛点,但现实差距源于模拟对物理机制的简化,如摩擦、噪声和延迟,导致模拟中高性能策略在现实中失效,甚至引发安全风险。
从理论上,机器人系统可建模为部分可观测马尔可夫决策过程(POMDP),包括状态空间𝒮、动作空间𝒜、转移动态𝒯、奖励函数ℛ、观测模型𝒪等。模拟近似真实动态𝒯_r和观测𝒪_r,但总有偏差。现实差距G定义为模拟POMDP ℳ_s与真实ℳ_r间的差异,主要包括动态差距G_dyn和感知差距G_perc;性能差距G_perf则衡量策略π在两环境下的回报差异J。关键洞见:无需消除所有差距,只需让策略对差异鲁棒,即可实现有效转移。这强调了从“缩小差距”到“克服差距”的范式转变。
>2. 现实差距的来源
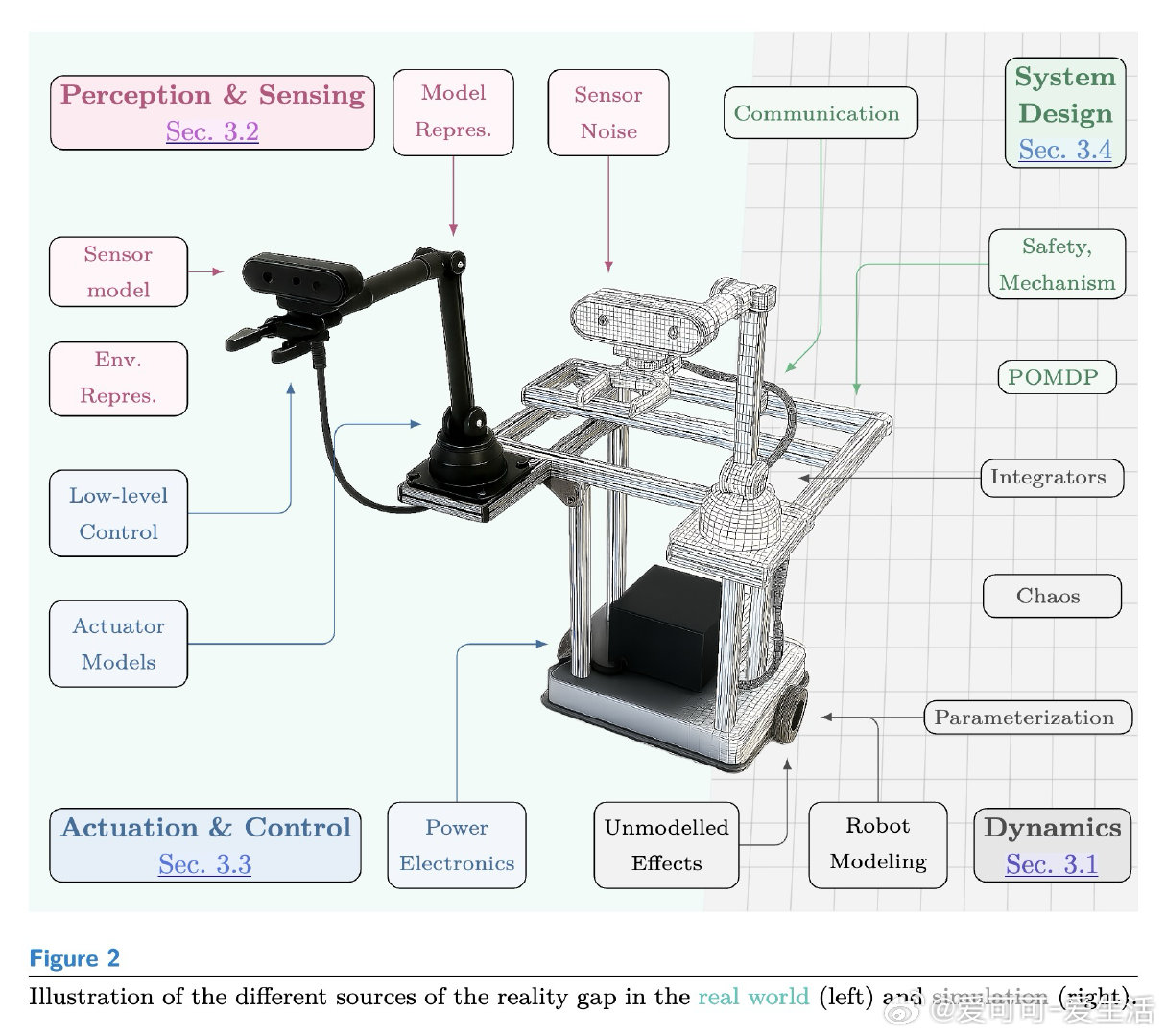
现实差距并非单一问题,而是多模块累积效应,包括动态、感知与传感、执行与控制,以及系统设计。理解这些来源有助于针对性优化。
2.1 动态差距
动态是核心来源,源于转移模型𝒯的偏差。模拟需决定建模内容、参数和离散化方式,导致策略利用模拟缺陷。
- 建模不准:模拟假设刚体动态,但真实物体可变形、关节有阻尼和背隙;混沌(如湍流)和随机性(如地表摩擦)难以捕捉;电池电压衰减和接触动态(如粘滑转换)常被简化,导致抓取失败或扭矩不足。症状:策略在真实中超调或不稳定。
- 参数化错误:摩擦、质量等参数难精确测量,且随时间变化。
- 数值积分:欧拉或Runge-Kutta方法引入累积误差,长任务中性能衰减。
- 人机交互:人类行为复杂,模拟常简化为预定义模式,导致策略误判。
- 未建模效应:磨损、热效应改变刚度,引起振动。
- 资产保真度:低分辨率几何忽略自碰撞或不规则地形。
这些问题在接触密集任务(如操作)中尤为突出,思考:动态建模需平衡计算效率与真实性,未来可融入物理先验以减少假设。
2.2 感知与传感差距
源于观测模型𝒪的偏差,先进渲染(如Isaac Sim的射线追踪)虽进步,但仍落后于真实复杂性。
- 传感器模型:RGB相机忽略镜头畸变和滚动快门;深度/LiDAR传感器省略量化噪声和反射率;IMU/GPS忽略漂移。症状:观测分布偏移,导致视觉策略失效。
- 传感器噪声:真实噪声非高斯、状态依赖(如运动诱发),模拟常简化为固定方差高斯噪声。
- 环境表示:低分辨率资产丢失纹理和光照细节;无HDRI背景导致不真实照明。
- 机器人模型:CAD简化忽略制造公差和磨损,引起自碰撞。
- 碰撞传感:代理形状(如凸包)在精细操作中不准。
洞见:感知差距放大动态问题,尤其在视觉主导任务中;选择抽象表示(如点云而非RGB)可降低门槛,但需权衡信息丢失。
2.3 执行与控制差距
执行是策略与世界的接口,偏差主导行为。
- 执行器模型:模拟视电机为一阶系统,忽略高阶延迟、非线性(如死区、迟滞)和齿轮效应。症状:高动态中抖动或延迟。
- 低级控制:厂商隐藏滤波器和饱和逻辑,模拟无法复制。
- 电源电子:PWM量化引入死区,保护机制限流。
2.4 系统设计差距
- 通信:模拟无延迟,真实有丢包和衰减机制。
- 安全机制:虚拟墙等未模拟,导致策略忽略。
- POMDP公式化:模拟奖励依赖特权信息(如精确碰撞),重置不可行。
- 实现细节:离散化粒度和频率不匹配引起不稳。
这些来源相互交织,思考:系统级设计(如硬件-软件协同)可从源头缓解,但需迭代验证。
>3. 现有解决方案
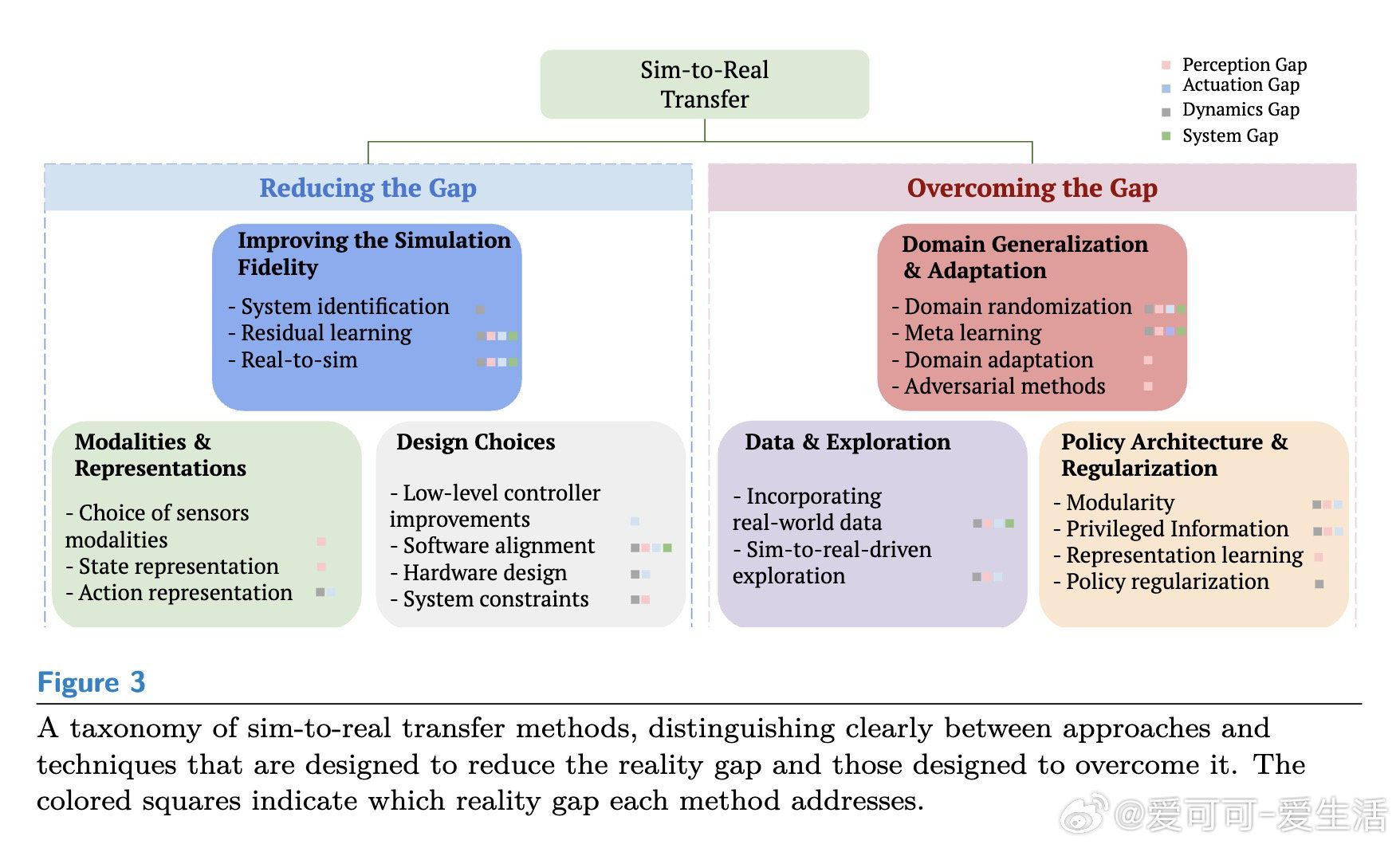
解决方案分两类:缩小差距(提升模拟保真度)和克服差距(增强策略鲁棒性)。通用配方:设计相关模拟、缩小差距、训练鲁棒策略、并行训练、真实评估、迭代调整。
3.1 缩小差距
- 改进模拟:系统识别(Sys-ID)校准参数,如延迟和摩擦,常用于导航/操作;学习残差模型修正输出(如LSTM预测轨迹差),适用于柔性体;真实到模拟(Real-to-Sim)用3D重建和神经渲染构建环境,桥接几何/动态。
- 模态与表示选择:优先深度/点云而非RGB,减少渲染负担;状态用关键点或基础模型嵌入,动作用关节速度空间,提升转移。
- 设计选择:提升低级控制器频率(如阻抗控制);对齐软件栈;硬件选低延迟执行器;约束动态(如准静态操作)降低敏感性。
这些方法直接针对来源,但计算成本高;洞见:结合Sys-ID与残差模型可实现自适应模拟,适用于大规模并行。
3.2 克服差距
- 域泛化与适应:域随机化(DR)训练参数分布(如质量/噪声),自动DR用真实数据优化范围;对抗训练引入扰动;元学习/RMA用特权信息推断动态,实现快速适应;域适应聚焦观测转移。
- 数据选择与探索:融入真实数据共训练(如残差RL);模拟驱动探索识别关键参数。
- 策略架构与正则化:模块化分解感知/控制;特权信息训练教师-学生模型;表示学习对齐分布(如对比学习忽略背景);正则化惩罚动作幅度/平滑度,确保鲁棒。
DR是最流行方法,已实现魔方操作和无人机冠军;思考:这些技术使模拟从“完美复制”转向“鲁棒代理”,但需防范过拟合真实分布外场景。
>4. 评估指标
区分现实差距评估(诊断模拟局限)和转移性能评估(固定差距下策略效果)。
4.1 评估现实差距
- 模拟-真实相关系数(SRCC):Pearson相关,衡量模拟性能是否预测真实(接近1为佳);低SRCC表示模拟不可靠。
- 离线重放误差:真实动作在模拟中的轨迹偏差,简单诊断动态一致性。
- 视觉保真度:分布级如FID/KID,单图像如SSIM/PSNR,量化感知偏移。
4.2 评估Sim-to-Real转移
- 成功率:任务完成比例,广泛用于操作/导航,但忽略鲁棒性。
- 累积奖励:RL中总回报,捕捉效率,但依赖奖励设计一致性。
- 任务特定指标:如路径效率或物体距离,提供细粒度洞见。
洞见:综合使用这些指标可迭代优化;未来需标准化基准,以公平比较方法。
>5. 讨论与开放问题
Sim-to-Real已驱动突破,如四足步态和敏捷飞行,但挑战持久:照片级渲染和复杂接触模拟仍难。开放问题包括:
- 错误模型下的更好控制器:模型基RL可聚焦高回报区域,而非全局准确;贝叶斯优化调参优于最优估计。
- 可微模拟器:如Warp/JAX提供精确梯度,未来结合学习动态提升优化效率。
- 视频与世界模型:视频模型生成帧但物理不准;世界模型从真实数据学习,缩小差距,但长预测误差大;融合物理先验是关键。
- 基于模拟的推理:神经后验估计参数分布,用于DR;多模态后验是未来方向。
- 大型机器人模型的模拟:模拟扩充模仿学习数据,但需最小差距;评估真实策略时,校准模拟以匹配性能。
这些问题凸显模拟的潜力:它不仅是工具,更是加速机器人革命的催化剂。通过结构化理解,我们可推动从实验室到现实的跃进。
>结论
现实差距是机器人模拟的核心瓶颈,但通过剖析来源、应用解决方案和严谨评估,我们能有效桥接模拟与真实。这不仅降低开发成本,还开启大规模数据驱动创新。研究者应优先迭代Sys-ID与DR,探索混合模型,以实现更可靠的Sim-to-Real。未来,模拟将助力通用机器人系统的诞生。
原文链接:arxiv.org/abs/2510.20808